2026年06月02日
RLWRLDが新モデル「RLDX-1」を発表 ——“手”から始まるAI革命とPhysical AIの現在地
2026年5月26日、KDDI本社にてフィジカルAIスタートアップRLWRLDによる新モデル発表会が開催された。会場には、事業会社の主要役員や部長クラス、新規事業・ロボット事業の担当者、スタートアップ関係者、各種メディア関係者など、約100名が参加するクローズドな環境ながら、濃密な議論が交わされる場となった。
イベントは同社CEOであるリュ・ジュンヒ氏によるオープニングから幕を開けた。リュ氏は冒頭、日本を単なる市場ではなく「フィジカルAIをともに作り上げる最重要パートナー」と位置づけていると強調したうえで、新モデル「RLDX-1」の日本正式ローンチを発表した。
この日の発表は、単なる新製品の披露ではなかった。それは、AIが「理解する存在」から「行動する存在」へと進化していく過程の、まさに現在地を示す場だった。
目次
“理解するAI”の限界を超える、RLWRLDが掲げた「Dexterity is Intelligence」
イベントを通じて繰り返し語られたキーワードが、「Dexterity is Intelligence」である。リュ氏はこの言葉を通じて、これまでのAIが抱えてきた本質的な限界に言及した。これまでAIは、テキストや画像といった情報処理において驚異的な進化を遂げてきた。しかし現実の産業現場においては、多くの重要な作業がいまだ人の手に依存している。その理由は、これらの作業が単なる“理解”ではなく、“操作”を伴うからだ。

RLWRLD Inc. CEO リュ・ジュンヒ氏
人間はコーヒーを注ぐとき、液体の様子を目で確認するだけでなく、手に伝わる重さの変化や微妙な抵抗感をもとに無意識に制御している。柔らかいものを扱うときには力加減を調整し、視界が遮られても触覚を頼りに作業を続ける。こうした行為は、視覚・触覚・力覚・記憶といった複数の要素が統合されて初めて成立する。
RLDX-1が提示するのは、まさにこの「統合された身体知」としての知能だ。知能とは単に考えることではなく、環境の中で適切に振る舞う能力そのものであるという認識への転換が、同社の出発点となっている。
RLDX-1が拓く“動く知能”——技術の核心
今回発表されたRLDX-1は、視覚・言語・行動に加え、触覚や力覚、記憶といった要素を統合したロボティクス基盤モデルである。 このモデルの特徴は、それぞれの機能が個別に存在するのではなく、一つの知能として連続的に接続されている点にある。つまり「見る」「理解する」「動く」「感じる」「覚える」という一連のプロセスが分断されることなく機能する。
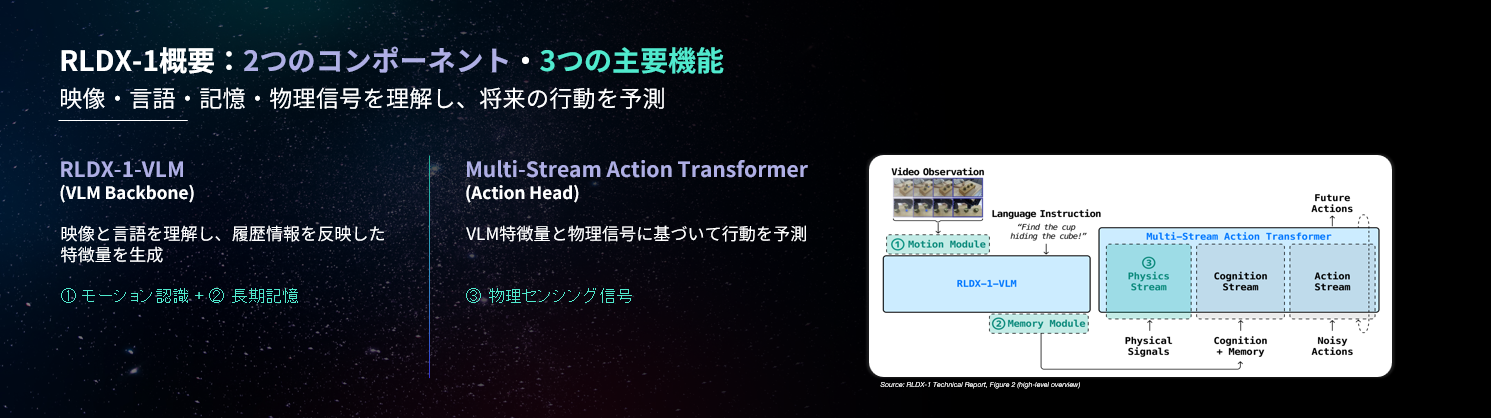
発表では、この統合がなぜ重要なのかが具体的な例とともに説明された。ロボットが動いている対象を扱う場合には、現在の位置を認識するだけでは不十分であり、次にどこへ移動するのかを予測する必要がある。さらに、複数の工程にまたがる作業では、過去の状態を保持して判断に活用しなければならない。そして、視覚では捉えられない接触状態を把握するためには、触覚や力覚が不可欠である。
RLDX-1はこれらの要素を統合することで、“状況に応じて行動を生成する”能力を実現している。これは従来のロボットが持っていた「事前に定義された動作を実行する」という性質から大きく進化した点である。
デモが示したロボットの到達点
イベントでは、技術説明だけでなく、動画およびライブデモによって実際の動作が示された。この瞬間こそが、今回の発表の中でも最も印象的なパートだったと言える。
まず紹介されたのは、コンベア上を流れる物体をピッキングし、箱に入れる一連の作業である。一見すると単純な作業だが、その背後では高度な処理が同時に行われている。流れてくる物体の動きを予測し、適切な位置で待ち構え、複数の指を連動させながら把持し、さらに別の手で箱を操作する。この一連の動作には、時間的な予測、空間認識、指先の精密制御、そして状況に応じたタスク分割といった要素が含まれている。

デモの様子
さらに象徴的だったのが、コーヒーを注ぐデモだ。このタスクでは、カップの中の状態が視覚的に見えないにもかかわらず、重量の変化をもとに適切な量を判断し、こぼさずに注ぐ動作が実現されていた。これは「視覚だけに依存しない知能」の実現を明確に示した例であり、触覚や力覚が統合されていることの意義を強く印象づけた。

また注目すべきは、これらの動作が特定のロボットに依存していない点である。同一モデルが異なるハードウェア上で動作する「クロスエンボディメント」が実現されており、今後の導入における柔軟性を大きく高める可能性があるのだ。
KDDIとの協業が示す社会実装のリアリティ
発表会では、パートナー企業によるユースケース紹介も行われ、その中でKDDIとの協業が具体的に説明された。現在、同社とRLWRLDは産業現場におけるデータ収集とモデル学習を共同で進めており、小売領域における作業自動化などをテーマに実証を行っている。
ここで重要なのは、Physical AIにおいては「現場データ」が極めて重要な資源であるという点である。テキストや画像とは異なり、物理的な動作に関するデータは現場でしか得られない。つまり、どれだけ実際の環境に入り込み、データを蓄積できるかが競争力を左右する。
RLWRLDは、顧客企業とともに現場にロボットを導入し、その運用を通じて得られたデータを再びモデルへフィードバックするという循環型のアプローチを取っている。この構造は、モデル性能の向上と事業化を同時に進めるうえで極めて合理的である。
日本から加速するPhysical AIの実装シナリオ
イベント全体を通して強調されていたのが、日本の重要性である。リュ氏は、日本がフィジカルAIの実現において不可欠な存在であると繰り返し述べた。その背景には、日本が持つ独自の産業構造がある。製造業や物流、小売といった領域において、人の手による高度な作業が多く残されている。これは裏を返せば、Physical AIにとって最も価値のあるユースケースが集積していることを意味する。また、少子高齢化による人手不足が深刻化していることも、技術導入の必然性を高めている。
RLWRLDは今後、まずはピッキングや配置といった基本動作の領域から導入を進め、2027年頃の初期デプロイ、2030年に向けたスケール拡大を見据えている。このアプローチは派手さこそないが、最も実装に近い現実的な戦略である。
今回の発表会が示したのは、AIがついに“働き始めた”という事実である。それは単なる効率化の延長ではなく、人とAIの関係そのものを再定義する変化を意味している。
このモデルが示した方向性は明確だ。AIはこれから、現実世界の中で学び、適応し、価値を生み出す存在へと変わっていく。その変化の起点となったのが今回行われた発表会だった。
そしてその流れは、確実に加速していく。

左:日本代表 李氏 右:CEO リュ・ジュンヒ氏