2023年01月26日
異メーカー・異機種を一元管理、ゲートやエレベーターとも連動する「ロボットプラットフォーム」をKDDIが手がける理由
- KDDI総合研究所
稗圃 泰彦(写真左) - atelierデザイン部門ライフスタイル・プロジェクト3グループ
- KDDI株式会社
畑川 養幸(写真右) - 技術統括本部 技術戦略本部 先端技術企画室
課題とチャンスのコーナーでは、毎回、コラボレーションした企業同士のケーススタディをお届けします。 KDDIとKDDI総合研究所は、2022年11月17日から、クラウド上でメーカーや用途を問わず多様なロボットを一元管理する「ロボットプラットフォーム」の実証を開始しました。
KDDIとKDDI総合研究所が開発したロボットプラットフォームは、さまざまな種類のロボットをクラウド上で一元管理する機能を備えています。また、ロボットが移動する際の障壁となるセキュリティゲートやエレベーターなどの建物設備と連動する機能についても、パートナー企業と共に検証を進めています。
このプロジェクトが何を目指し、そして、検証の向こうにどんなサービスの提供が待ち構えているのか。プロジェクトをリードされている、KDDI 技術統括本部 技術戦略本部 先端技術企画室の畑川養幸さんと、KDDI総合研究所 atelierデザイン部門ライフスタイル・プロジェクト3グループの稗圃(ひえはた)泰彦さんに話を伺いました(太字の質問はMUGENLABO Magazine編集部)。
簡単に自己紹介をお願いできますか。
稗圃:私は2007年に入社、研究所でネットワークパケットがどのように流れているのかを監視・分析・制御をする研究に従事していました。その後KDDI本社のプラットフォーム開発本部に移り、例えば、通信障害が起きた時にパケットの流れからどの設備に原因がありそうか予測するシステムを開発していました。研究所で培った要素技術を、本社で運用システムとして開発することになったという感じです。
パケットを見ているといろんなサービスが使われていることが分かりますが、これは言い換えれば、ユーザーが目的を持ってサービスを利用し、トラヒックを発生させてパケットを流しているということです。例えば地域ごとや時間帯ごとに使われるサービスが全然違うとか。こういったことを目の当たりにして、人の生活と通信にどういう関係があるのか興味を持つようになりました。
その後、研究所に戻ってきましたが、その頃から、サービス起因で通信の使われ方がどのように変わるかという、特にサービスオリエンテッドな思考を持つようになりました。KDDI research atelier立ち上げのタイミングで、ロボット配送によりライフスタイルがどのように変化するかを研究するプロジェクトに誘われて、要件整理やらロボットの選定やらの検討会に参画するようになり、気づいたら開発もやっていて本業になっていたという経歴です。
畑川:私は2005年入社です。2014年3月までの約9年間、4G LTEや5Gなどの無線通信方式の研究開発や国際標準化の仕事に従事していました。もともと良い技術を作れば世の中は良くなると信じ、それができる研究開発の仕事をすることを強く希望してKDDIに入社しました。
9年間のキャリアの中で、新たな技術を考え出したり、世界中の優秀な研究者と接する機会にも恵まれるなど、概ね希望していた通りの仕事ができていたのですが、一つだけ誤算がありました。それは、技術を作るのは研究者かもしれないが、使うかどうかを決めるのは研究者ではないということです。
自分は技術そのものが好きというより、技術を活用して世の中を良くすることに関心が強かったため、8年程経った頃には研究開発から離れる覚悟を決め、自費でビジネススクールに通い始めました。その後、異動の希望が叶い、KDDI本体の事業企画部門に移ります。そこでは3年半ほど、KDDIの売上、利益の大きなウェイトを占めるパーソナル事業の事業戦略を作ったり、財務関連のプロジェクトにも携わるなど、研究所時代とは全く異なる経験・人脈を得ることができました。
2017年10月には、退路を断ったつもりで出てきたので正直なところ希望はしていなかったのですが(笑)、研究開発部門に近い技術企画部門に戻るお話を頂きました。新しい技術を社内で活用したり、技術渉外を担当するグループのグループリーダーになり、丸4年務めました。
2021年10月に技術戦略本部が新設され、KDDI Accelerate 5.0(ネットワーク、プラットフォーム、ビジネスの3点から描いたKDDIの次世代社会構想)のプラットフォームレイヤとビジネスレイヤを担当する先端技術企画室へ室長として異動しました。そこからは、ロボットもありますし、他にも様々なテクノロジーを活用した事業を作っていくプロジェクトに携わっています。
今回の取り組みに至った背景は何ですか?
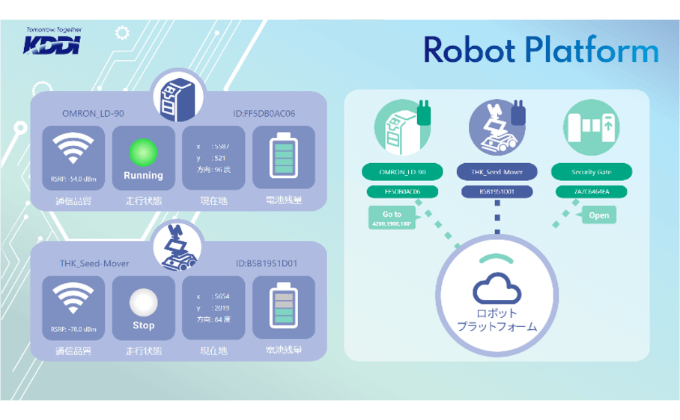
ロボットプラットフォームの管理画面イメージ
稗圃:自己紹介でも言いましたが、もともと、研究所の新しい拠点であるKDDI research atelier立ち上げのタイミングで、配送ロボットによるライフスタイルの変化の研究を進めていて、まずは研究所社員向けにフードの配送実証もやっていました。当時は、ここ(KDDI research atelier)にコンビニの商品を置いた小さな店舗があって、それをロボットが社員のところまで運んでいくことで、社員がコンビニまで買いに来なくて済むようになっていました。
ロボットの自動配送で、購買の手間を徹底的に削減したら、人はどんな行動を取るようになるだろう?空いた時間で何をするようになるだろう?といった実証評価をやっていたわけです。ロボットが配送してくれるという前提なので、ロボットを動かすシステムを作らなきゃいけないですよね。ですが当時は実証に都合の良いロボット配送システムがなかなか見つからなくて…。
結局は手探りで要件定義から設計・開発を進めることになりました。その過程で、知識の体系化やノウハウ化が進み、今のロボットプラットフォームに繋がったとも言えますね。
野村不動産ホールディングス様とは、横浜の大規模集合住宅「プラウドシティ日吉」で2021年初めから商品配送の実験をされていましたね?
稗圃:プラウドシティ日吉には、敷地内にコンビニやスーパーが併設されていて、ロボットは公道を通らずに、敷地内でお客様宅に商品を持っていけるんです。公道を通らないので、行政機関への申告手続きなどの手間が少ないんです。一方で、当然お住まいの方々の敷地を通らせていただくわけで、管理組合の許可は必要になってきますし、慎重に対応しないといけません。
畑川:野村不動産ホールディングス様は中長期経営計画のDX推進の中で「商業施設から住宅へのロボット配送」を挙げられていて、その部分を一緒に取り組ませて頂いております。私の理解では、集合住宅などでも、今後の人手不足の解決策として、配送に限らずさまざまなロボットが使われていくのだろうと思います。
ただ、いろんなロボットメーカーがそれぞれの仕様で作っているので、マンションの管理会社などが全てのロボットメーカーのロボットを統合的に運用するのは難しいわけです。我々が現在開発中のロボットプラットフォームは、集合住宅などでも様々なロボットが安全かつ便利に活用され、お住まいの方々が快適に生活できる世界を目指しています。(編注:エレベーター連動は今後検討)

「プラウドシティ日吉」では、ECサイトでオーダーした商品をロボットで宅配配送する実証実験を計画中。これに先駆けて、人力配送での予備実証も行った(2022年3月)。
ロボットメーカーがロボットの機能として、セキュリティゲートやエレベーターと連動する仕組みを作ることは難しいのでしょうか?なぜKDDIが行うのでしょう?
稗圃:セキュリティゲートやエレベーターは、それぞれ制御の仕組みや遠隔操作するためのAPI(ソフトウェアやシステム連携のためのインターフェイス)が異なるんです。ロボットメーカーが配送ロボットを作りたいと思っても、通行するすべてのエレベーター(やセキュリティゲートなど)と連動して動くところまでやるのは難しくて、そうするとサービス展開まで行き着けない。
ですから、そこはプラットフォームがワンストップサービスで動いて、ロボットのためにエレベーターも呼ぶし、乗り降りも含めてロボットに全体的な移動指示をすればいいんじゃないか、という思想です。
(ロボットやセキュリティゲート、エレベーターのメーカーなど)どっちから見ても痒いところに手が届くということですね。ずっと求められてきたけど、これまでなかなか進んできませんでした。

セキュリティゲートとロボットは、ロボットプラットフォーム経由で連動
同じようなことを手がけているプレーヤーはまだ無いということですが、ロボットプラットフォームをKDDIが手がけることで、どんな特徴が生まれるのでしょうか?
稗圃:僕らが今推したいのは、黒い弁当箱みたいな通信デバイスです。ROS(ロボットOS)対応のロボットであれば、基本的にはこれを差すだけで、プラットフォームとのやりとりを仲介してくれるという優れモノです。ROSの機能を使っているだけなので、そこ自体に新しさがあるわけではないですが、差し込むだけでプラットフォーム側から運行管理ができるようになるわけです。
プラットフォームの上には配送を含めた色んなサービスが繋がっていくはずで、(プラットフォームに接続されている)どのロボットを使うかといった、サービスマッチングのところまで進められると面白いと思っています。通信デバイスは、いわばロボット向けの通信回線の提供でもあるので、回線ビジネスににも発展しそうです。
畑川:ここ10〜15年で多くのサーバシステムがオンプレミスからクラウドへ移行していきました。今のロボットは基本的にはロボットの中で色々な処理をしていて、いわばオンプレミスの状態です。
一方、今後ロボットの数が増えてくると、サーバシステムと同様、ロボットの中での処理をクラウドに集約していった方が、柔軟性(ロボットへの機能追加)や経済性(ロボットの製造コスト)の観点で合理的になる時代がくると思います。
そうした時には、ネットワークスライスを活用して、ロボットとクラウド間の重要な通信を優先制御したり、MEC (Multi-access Edge Computing)を活用して低遅延で処理するなど、通信キャリアならではのロボットプラットフォームが提供できるようになると考えています。