- インタビュー
2025年07月01日
船の自動運転で水上交通に革命を

- 株式会社エイトノット
木村 裕人 - 代表取締役
400以上の有人離島を抱える日本で、船舶の操縦難易度の高さと担い手不足が深刻な課題となっています。この課題に挑むのが、船の自動運転技術を開発するスタートアップのエイトノットです。
エイトノットは、2021年3月に設立された船の自動運転技術スタートアップで、小型船舶向け自律航行技術開発を中心に「海のDX」と「船舶のロボット化」を推進しています。同社が開発する自律航行プラットフォーム「エイトノット AI CAPTAIN」は、既存船舶への後付けが可能な点が大きな特徴です。新造船を必要とせず、現在運航中の船に自律航行システムを追加できるため、導入のハードルが大幅に下がるのが特徴です。
同社のシステムは船舶の状況をリアルタイムで把握しながら安全に航行し、他船や障害物回避行動などの操船動作も自動化します。多様な推進機関に対応可能な技術の汎用性も持ち合わせており、船舶乗組員のサポートや安全性の向上、運用コストの最適化を実現することで、水上輸送をより身近なものにすることを目指しています。
現在、瀬戸内海を中心に6隻での実装を進め、2025年2月には東京港で初の自律航行実証にも成功しており、2027年には北米市場への展開を計画する同社の挑戦にせまります。
マリンスポーツ体験から見えた船の課題

エイトノットは船舶の自動運転技術を開発する(写真提供:エイトノット)
木村氏が船の自動運転技術開発に取り組むきっかけは、極めて個人的な体験から始まりました。もともとマリンスポーツが好きだった木村氏は、実際に船を運転し始めて、その操縦の難しさに驚愕したと言います。
初めて船に乗ったときに、非常に操縦が難しい乗り物だなと感じました。車と比較すると、車の場合は誰が乗ってもいろんな安全装備が付いていて、どの車に乗っても大体乗り味も同じなので、手軽に使うことができます。船の場合は車と違って水の上に浮いている状態なので、例えばハンドルを切っても、まっすぐに曲がらない。車線や標識もないので360度を常に監視しなければいけない。非常に操縦される方の負荷が高い乗り物だと感じました。
木村氏
この個人的な体験から、木村氏は船舶事故の統計を調べ始めると、自身が感じた不便さや難しさが実際に事故の原因となっていることが統計的に明らかなことが分かりました。さらに調査を深めると、日本の有人離島では船舶が重要な移動手段として機能していますが、操縦の困難さに加えて担い手不足や安全性の面で深刻な課題を抱えていることが分かりました。
木村氏は これまでの社会人経験を活かし、技術によってこの課題を解決する道を選択することにしました。「船の自動運転技術を社会実装することによって、水上交通のさまざまな制約をなくしていくこと」「担い手不足や安全性の面で課題を抱えている事業者の方をサポートしていくこと」という2つの側面でエイトノットの事業が始まりました。
産学連携で進めた社会実装への挑戦

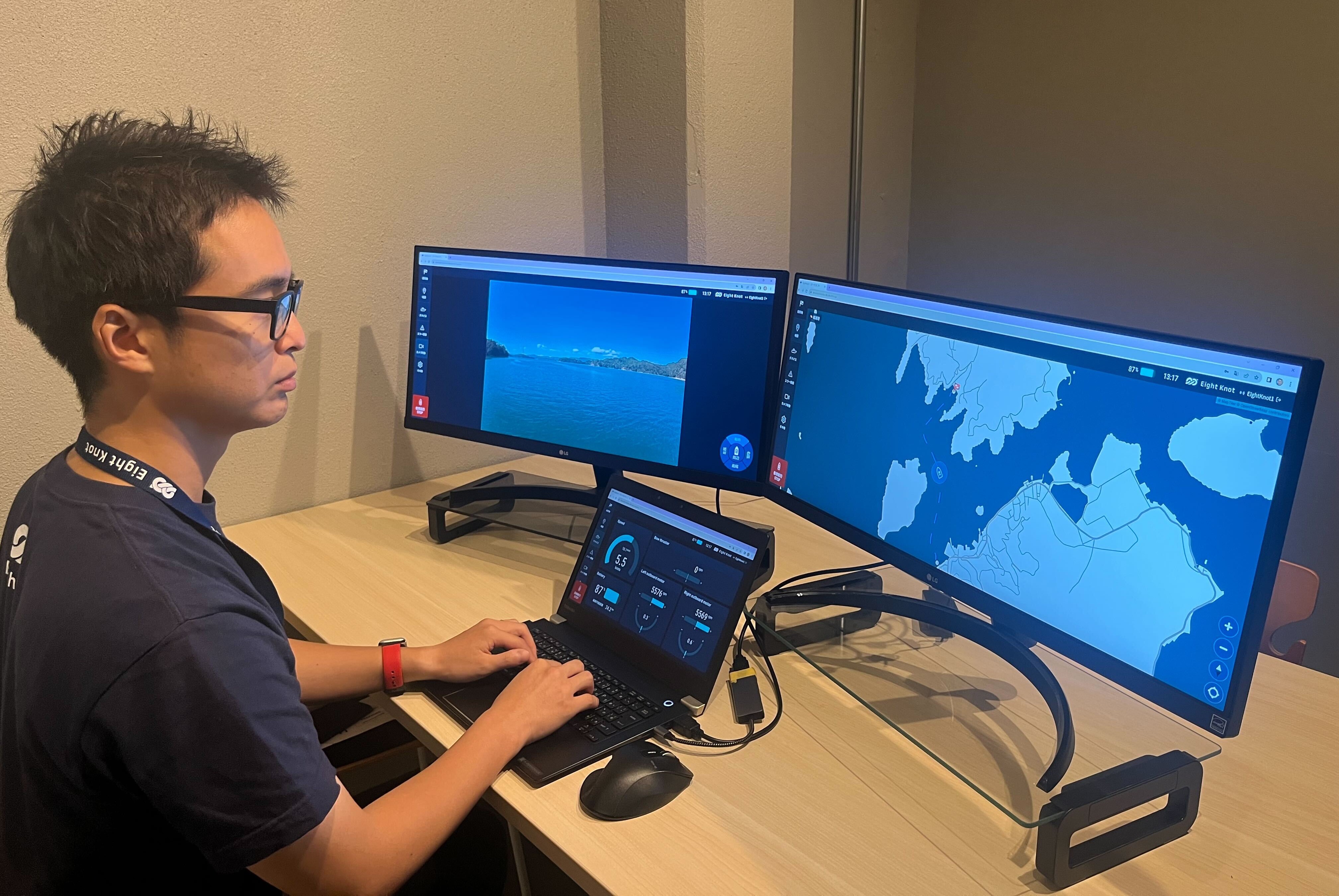
航行中の操船モニター画面(写真提供:エイトノット)
船の自動運転技術開発に乗り出したエイトノットですが、創業当初の木村氏にはプレジャーボートで少し乗った経験があるだけで、船舶の専門知識は十分ではありませんでした。そこで重要な転機となったのが、広島商船高等専門学校との産学連携による実証実験です。
広島商船高等専門学校は船舶関係の実験を数多く手がけており、豊富な経験とノウハウを持っています。この協働を通じて、船舶業界の現実と技術を社会実装するための複雑なプロセスを学ぶことができたと木村氏は語ります。
この産学連携での学びを活かし、エイトノットは着実に社会実装を進めていきました。現在では瀬戸内海エリアを中心に6隻で実装済みとなり、すでに現場で船長の負荷軽減と安全性向上を実現しています。
2025年2月には東京港で自律航行実証実験にも成功し、既存船舶への後付けが可能なシステムの汎用性を実証しました。
エイトノットの技術は新造船を必要とせず、現在運航中の船に自律航行システムを追加できるため、導入のハードルを大幅に下げることが可能です。この特徴が、様々な海域での実装を可能にしている要因となっていると言えるでしょう。
2027年北米進出〜グローバル戦略の全貌

自律航行船が航行する様子(写真提供:エイトノット)
国内での実装を着実に進めるエイトノットですが、事業拡大の方法に大きな課題を感じています。
船1隻1隻に対してシステムを実装し、カスタムしていく現在の形態では、事業のスケールが困難です。この課題を解決するため、2027年からアメリカのプレジャーボート市場への参入を計画しています。
木村氏
エイトノットのもともとのビジョンは、ハードウェアに依存しない形でソフトウェアとして自動運転技術を提供し、様々なメーカーに展開していくことでした。北米市場では船舶の操船アシストシステムを展開し、パートナー企業と共に事業展開を目指します。
しかし、海外展開には技術的課題と制度的課題が存在します。日本では準天頂衛星「みちびき」を使用していますが、アメリカでは GPS を使用する必要があり、同等の精度確保が課題となっています。
また、船の自動運転を市場投入する際の規定が連邦レベルと州レベルで異なるため、複雑な対応が必要です。
興味深いのは、日本とアメリカの船舶免許制度の違いが生み出すニーズの差です。日本では小型船舶の免許取得が必要ですが、アメリカでは州によって規制がない場合もあります。船を購入したその日に運転でき、事故を起こすケースも少なくありません。船の運転に対する課題はグローバル共通ですが、顧客ニーズは市場ごとに大きく異なります。
エイトノットのグローバル戦略で最も注目すべきは、その循環構造にあります。アメリカ市場で技術を洗練させた後、その成果を日本に持ち帰る計画を描いています。現在のシステムは個人で漁業を営む中小規模の事業者にとって投資は容易ではありませんが、そうした人たちこそ自律航行技術を必要としているのです。
アメリカで展開した技術をスケールメリットを活かして普及価格帯の廉価版モデルとして開発し、それを日本に持ち帰る。この循環により、初めて真の意味での水上モビリティの普及が可能になると木村氏は考えています。
水上交通の未来図
遠隔モニタリングシステム イメージ(写真提供:エイトノット)
エイトノットが描く船舶自動運転の最終形は、現在の水上交通の概念を根本から変える可能性を秘めています。
将来的には陸上の支援センターで1人の船長が複数船舶の安全管理を担当する体制を目指しています。例えば東京湾に30隻から40隻の水上タクシーが無人で運航し、それらすべてを陸上の管制センターから監視・制御するという構想です。
木村氏
この運航システムが実現すれば、ユーザーにとって船はより身近な移動手段となります。現在のように各船舶に船長が必要な状況では、運航コストや人員確保の制約から、船舶を気軽に利用することは困難です。
しかし、陸上管制による効率的な運航が可能になれば、移動のオプションとして船舶をより日常的に活用できるようになります。
この技術の可能性を具体的に示すため、エイトノットは2025年7月に大阪万博のヘルスケアパビリオンで技術展示を行う予定です。ブース内に設置された水槽の中で、30センチ程度の船舶モデルのデモを来場者が直接目にすることができます。
エイトノットが目指す未来の水上交通は、現在の陸上交通と同様に、複雑な操縦技術を習得することなく、安全で便利な移動手段として活用される世界です。陸上の管制センターから複数船舶を効率的に管理し、ユーザーは目的地を指定するだけで自動的に目的地まで運ばれるような水上交通システムが実現すれば、都市部における移動の選択肢は大幅に拡大し、新たな経済圏の創出にもつながる可能性があります。
木村氏の個人的なマリンスポーツ体験から始まった課題意識は、やがて「あらゆる水上モビリティを自律化する」という壮大なミッションへと発展しました。大阪万博での技術展示は、この未来への第一歩を多くの方に示す重要な機会となるでしょう。
 めぇ〜ちゃん
めぇ〜ちゃん- 2025年7月1日(火)~2025年7月7日(月)の期間、大阪・関西万博に行かれる方は是非、大阪ヘルスケアパビリオンにお立ち寄りください!
関連リンク
関連記事

インタビューの記事
-

起業時から世界に通用する基礎を築く——AI 人材紹介で海外挑戦するクレイ・テクノロジーズ中田CEO
2025年06月30日
-

共創を持続的に生み出すソーシャルコワーキング- ATOMica
2025年06月26日